Reinforcement learning (RL) algorithms face significant challenges when dealing with
long-horizon robot manipulation tasks in real-world environments due to sample
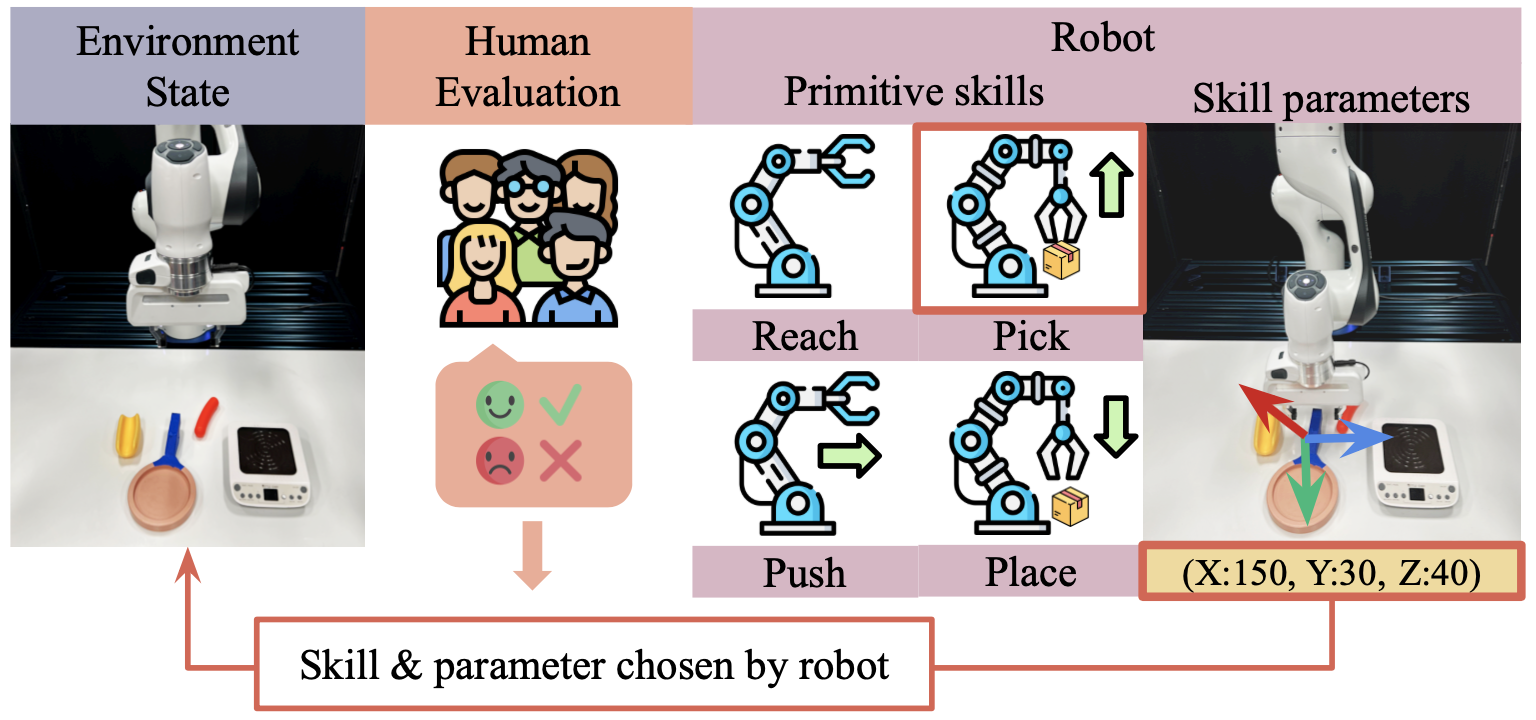
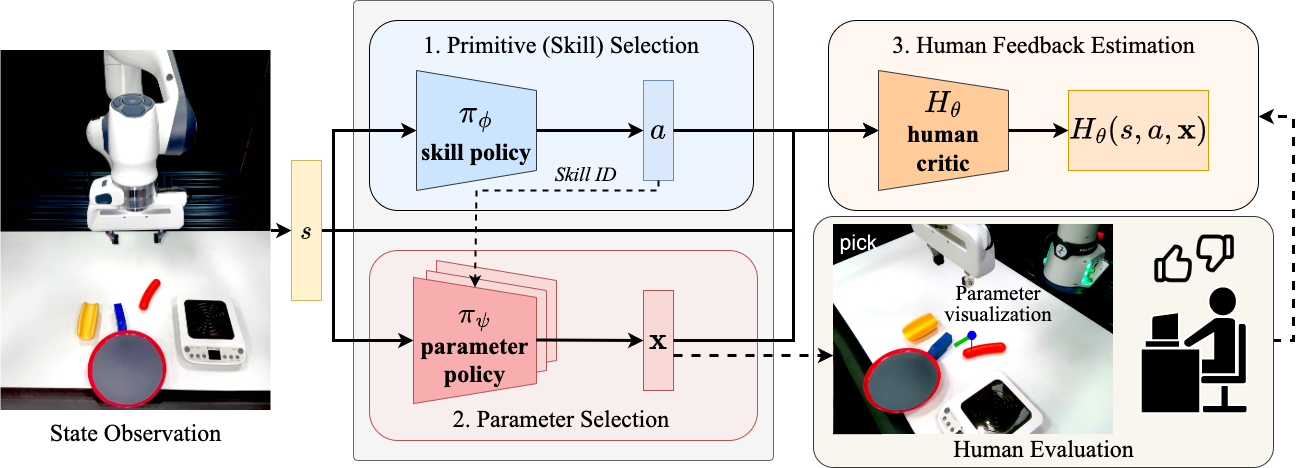
inefficiency and safety issues. To overcome these challenges, we propose a novel
framework, SEED, which leverages two approaches: reinforcement learning from human
feedback (RLHF) and primitive skill-based reinforcement learning. Both approaches
are particularly effective in addressing sparse reward issues and the complexities
involved in long-horizon tasks. By combining them, SEED reduces the human effort
required in RLHF and increases safety in training robot manipulation with RL in
real-world settings. Additionally, parameterized skills provide a clear view of the
agent's high-level intentions, allowing humans to evaluate skill choices before they
are executed. This feature makes the training process even safer and more efficient.
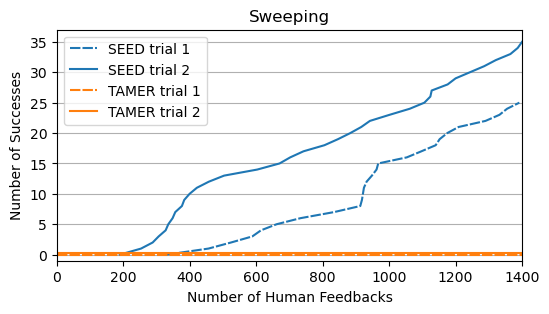
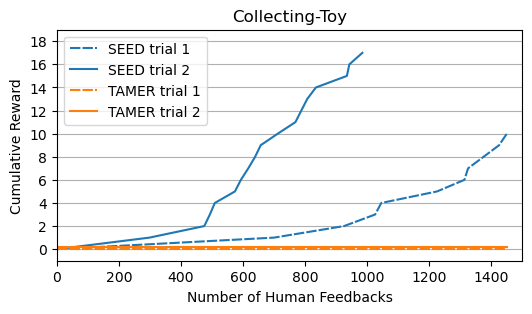
To evaluate the performance of SEED, we conducted extensive experiments on five
manipulation tasks with varying levels of complexity. Our results show that SEED
significantly outperforms state-of-the-art RL algorithms in sample efficiency and
safety. In addition, SEED also exhibits a substantial reduction of human effort
compared to other RLHF methods.